Signature Inversion#
This notebook follows Section 3.6 of Deep Signature Transforms. PyTorch code can be found at this
import equinox as eqx
import jax
import jax.numpy as jnp
import jax.random as jrandom
import matplotlib.pyplot as plt
import numpy as np
import optax
from signax import signature
jax.config.update("jax_platform_name", "cpu")
seed = 1234
key = jrandom.PRNGKey(seed)
signature_depth = 12
learning_rate = 2 * 1e-3
num_training_iters = 5000
Preprocessing data#
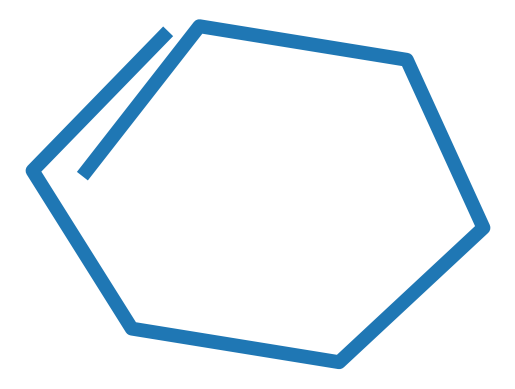
Here we consider number 0
# number zero (PenDigit)
path = [29, 97, 0, 57, 22, 10, 68, 0, 100, 40, 83, 90, 37, 100, 12, 57]
path = np.array(path, dtype=float).reshape(-1, 2)
# rescale into range (-1,1)
path = -1.0 + 2 * (path - np.min(path)) / (np.max(path) - np.min(path))
path = jnp.array(path)
Let’s visualize the data
plt.plot(*path.T, label="Original path", linewidth=10, linestyle="-")
plt.axis("off")
(-1.1, 1.1, -1.1, 1.1)
Compute signature of the given data
sig = signature(path, depth=signature_depth)
Model#
This model is quite simple: set of parameters (in eqx.nn.Linear) represents the path.
The model outputs the signature of the learnable parameters.
class InvertSignature(eqx.Module):
path_length: int
signature_depth: int
# path represented as weight of linear layer
# can instead use `jnp.ndarray`
path: eqx.nn.Linear
def __init__(self, path_length, signature_depth, *, key) -> None:
self.path_length = path_length
self.signature_depth = signature_depth
self.path = eqx.nn.Linear(
in_features=1,
out_features=2 * path_length,
use_bias=False,
key=key,
)
def generate_path(self, x):
x = self.path(x)
return jnp.reshape(x, (self.path_length, 2))
def __call__(self, x):
x = self.generate_path(x)
return signature(path=x, depth=signature_depth)
Model instantiation
model = InvertSignature(
path_length=path.shape[0], signature_depth=signature_depth, key=key
)
Create optimizer
optim = optax.adam(learning_rate=learning_rate)
opt_state = optim.init(eqx.filter(model, eqx.is_array))
A normalization term to compute the loss. The idea here is to penalize more higher order of signatures
normalization = [
np.floor(np.log(i + 1) / np.log(2))
for i in range(1, 2 ** (signature_depth + 1) - 1)
]
normalization = jnp.array(normalization)
In fact, the input of the model is fixed
x = jnp.ones((1, 1))
y = sig
Compute loss in Equinox style
@eqx.filter_value_and_grad
def compute_loss(model):
pred_sig = model(x)
diff = y - pred_sig
diff = diff * normalization
return jnp.log(jnp.mean(diff**2))
@eqx.filter_jit
def make_step(model, opt_state):
loss, grads = compute_loss(model)
updates, opt_state = optim.update(grads, opt_state)
model = eqx.apply_updates(model, updates)
return loss, model, opt_state
Training step#
for i in range(num_training_iters):
loss, model, opt_state = make_step(model, opt_state)
loss = loss.item()
if i % 500 == 0:
print(f"Iter={i} \t loss={loss:.4f}")
Iter=0 loss=2.1267
Iter=500 loss=-7.2773
Iter=1000 loss=-7.7294
Iter=1500 loss=-8.0810
Iter=2000 loss=-8.3676
Iter=2500 loss=-8.6448
Iter=3000 loss=-8.9190
Iter=3500 loss=-9.2010
Iter=4000 loss=-9.4967
Iter=4500 loss=-9.8067
Helper function to refine path#
The following two functions taken from this file
def _get_tree_reduced_steps(X, order=4, steps=4, tol=0.1):
if len(X) < steps:
return X
dim = X.shape[1]
# slide over a window size = `steps``
for i in range(steps - 1, len(X)):
# no redudancy in path -> compute its signature
new_path = X[i - steps + 1 : i + 1] # noqa: E203
new_path_sig = signature(new_path, order)
# reduce the path with the first and the last
new_path2 = jnp.r_[
X[i - steps + 1].reshape(-1, dim),
X[i].reshape(-1, dim),
]
new_path2_sig = signature(new_path2, order)
# compute the difference between two signatures
norm = jnp.linalg.norm(new_path_sig - new_path2_sig)
if norm < tol:
# if it is reducible, the perform the same procedure on the
# next sub path
return _get_tree_reduced_steps(np.r_[X[: i - steps + 2], X[i:]])
return X
def get_tree_reduced(X, order=4, tol=0.1):
"""Removes tree-like pieces of the path."""
X = jnp.r_[X, [X[-1]]]
for step in range(3, len(X) + 1):
X = _get_tree_reduced_steps(X, order, step, tol)
if (X[-1] == X[-2]).all():
return X[:-1]
return X
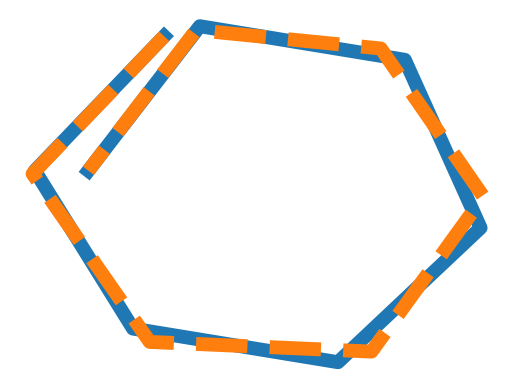
Plot result#
generated_path = model.generate_path(x)
generated_path += path[0] - generated_path[0]
generated_path = get_tree_reduced(generated_path, tol=1e-2)
plt.plot(
*path.T,
label="Original path",
linewidth=10,
linestyle="-",
)
plt.plot(
*generated_path.T,
label="Generated path",
linewidth=10,
linestyle="--",
)
plt.axis("off")
(-1.111672592163086, 1.113952350616455, -1.1, 1.1)